
branch manager
Climbing New Frontiers
Climbing New Frontiers


Branch Manager is a soft-gripping climbing robot with embedded magnetic sensing for navigating plant structures in agricultural applications.
Creator
MAY 2025 - PRESENT
Zachary Charlick
Dr. Xiaonan Huang
Dr. Dmitry Berenson
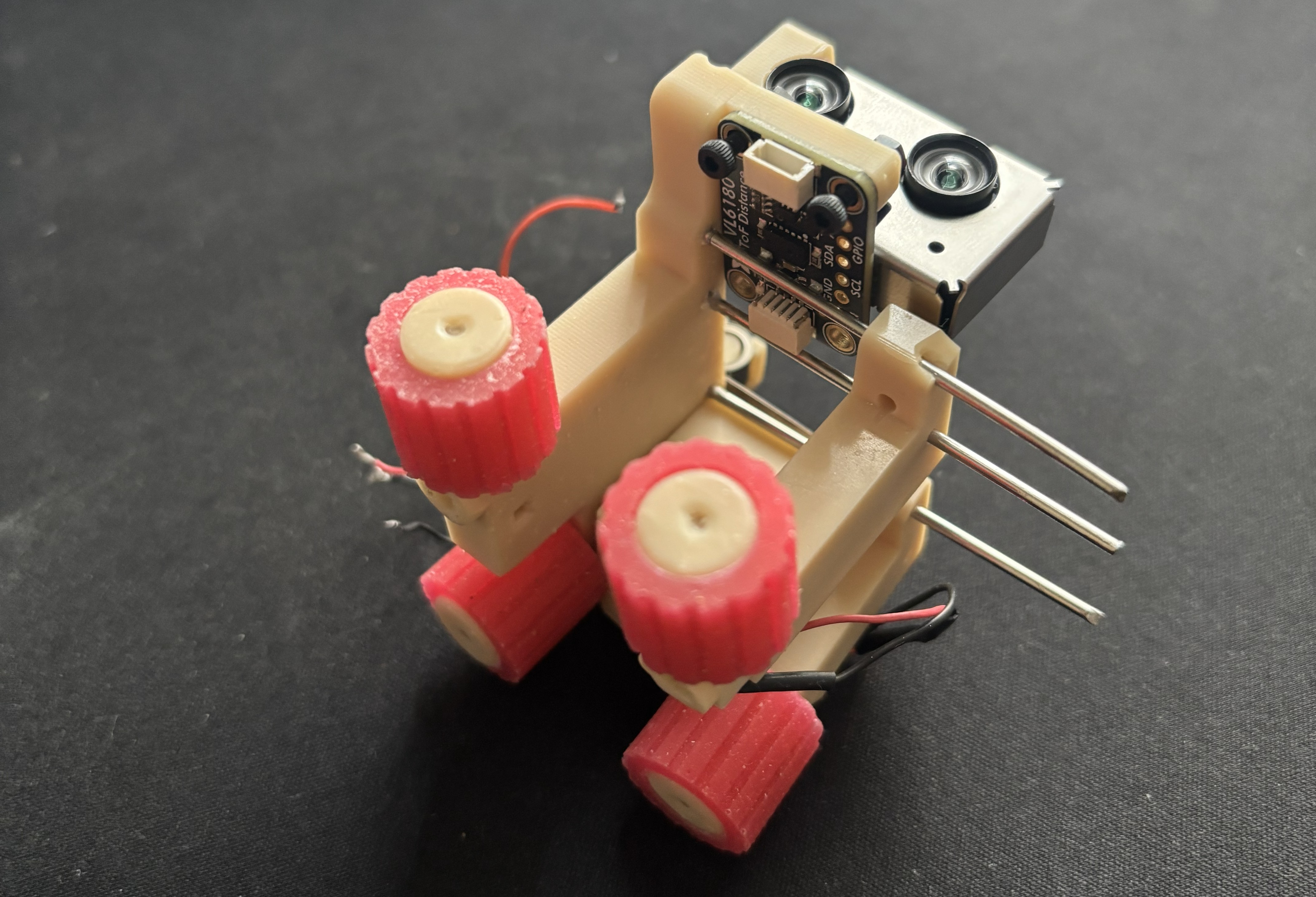
The primary objective of this project is to develop a compact climbing robot capable of navigating plant structures with stems ranging from 12mm to 30mm in diameter. Leveraging soft silicone wheels with embedded magnetic sensing and a dual-module gripping mechanism, Branch Manager adapts to varying stem diameters, branch junctions, and curved paths with high reliability. This platform integrates iterative design, precision soft fabrication, and novel deformation sensing to demonstrate the potential of soft robotics for plant monitoring, phenotyping, and targeted intervention tasks in agricultural environments.
The robot successfully traverses variously angled branches on 20mm diameter stems, demonstrating adaptive grip adjustment at junction points.
Testing on curved branches with 50mm, 75mm, and 100mm radii validates the robot's ability to maintain contact through continuous curvature changes.
Ascent, descent, and rotation capabilities demonstrated on 30mm diameter stems, representing the upper range of typical crop stalks.
The same motion primitives achieved on 12mm diameter stems, confirming adaptability across the full target diameter range.
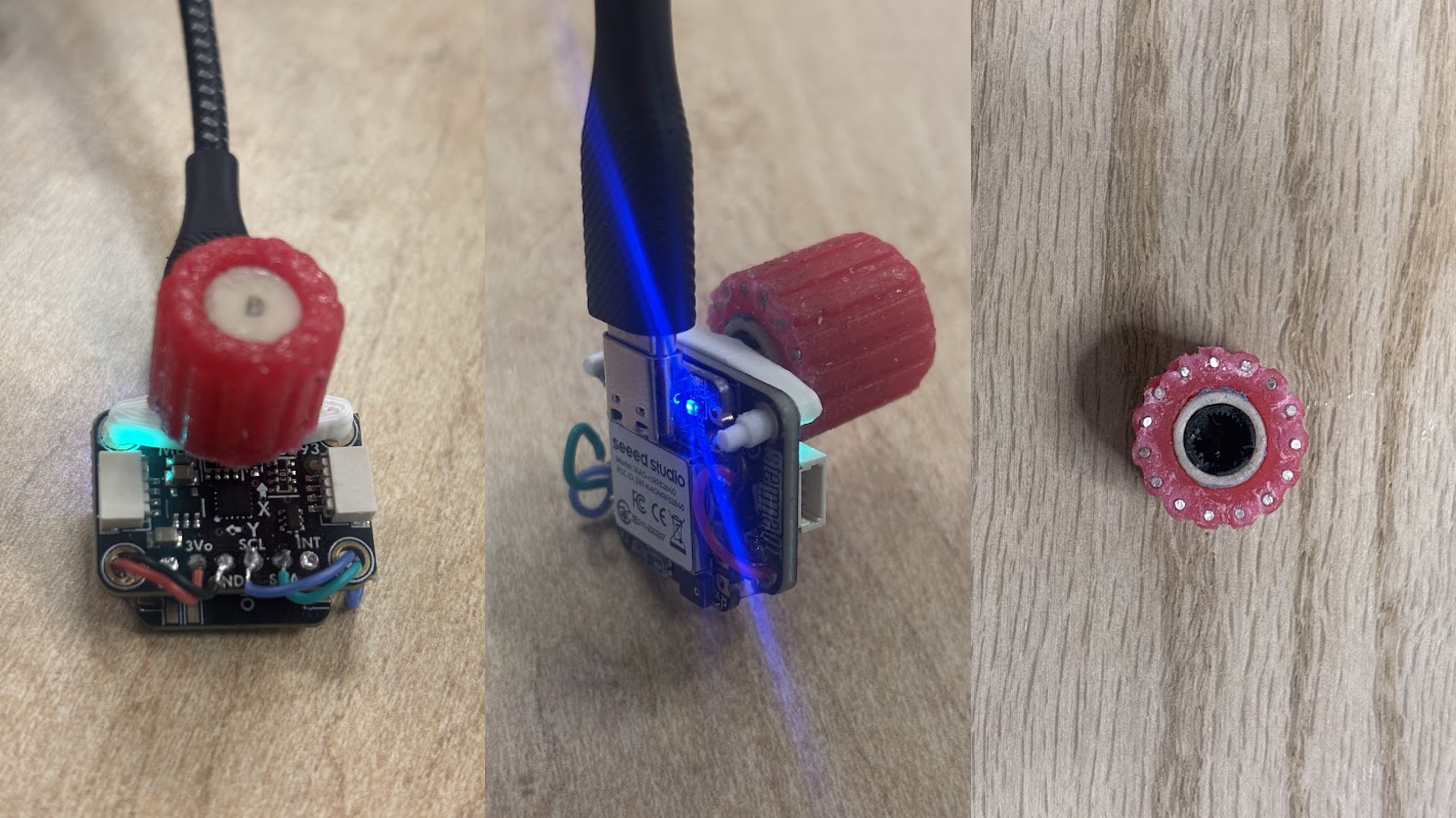
The sensing system embeds 1mm neodymium magnets in a circular array within EcoFlex 00-50 silicone wheels. As the wheel compresses against a surface, the magnets move closer to a fixed MLX90393 3-axis magnetometer mounted on a XiaoSense microcontroller. This displacement produces a measurable change in magnetic field strength—52% reduction over 3.6mm compression—enabling real-time deformation sensing without mechanical contact. This approach overcomes the limitations of traditional force-sensitive resistors, which require higher actuation forces than soft wheel deformation typically produces.

