fontana
Painting the Future, Together
Painting the Future, Together


Fontana is a collaborative robotic painting system designed to explore human-robot co-creation with professional artists.
Robotics Researcher
MAY 2025 - AUG 2025
Francesca Cocchella
Eric Chen
Dr. Patricia Alves-Oliveira

Fontana is a collaborative robotic painting platform developed at the University of Michigan's Robot Studio that investigates how professional artists experience creative collaboration with autonomous robots. The system pairs a UF850 6-DOF robotic arm with custom hardware—including 3D-printed tool fixtures and a retractable brush-swapping mechanism—and a ROS 2 control architecture to enable iterative, turn-based painting between human artists and an AI-driven agent. This research contributes empirical insights into human-robot co-creation, informing the design of future creative robotic systems.

Custom 3D-printed holders for palette, water container, and cleaning rag, optimized for repeatable positioning and autonomous robot access.

Retractable brush-swapping system (V3.1) inspired by ballpoint pen mechanics, featuring a cam-slotted body and collet for quick changes.

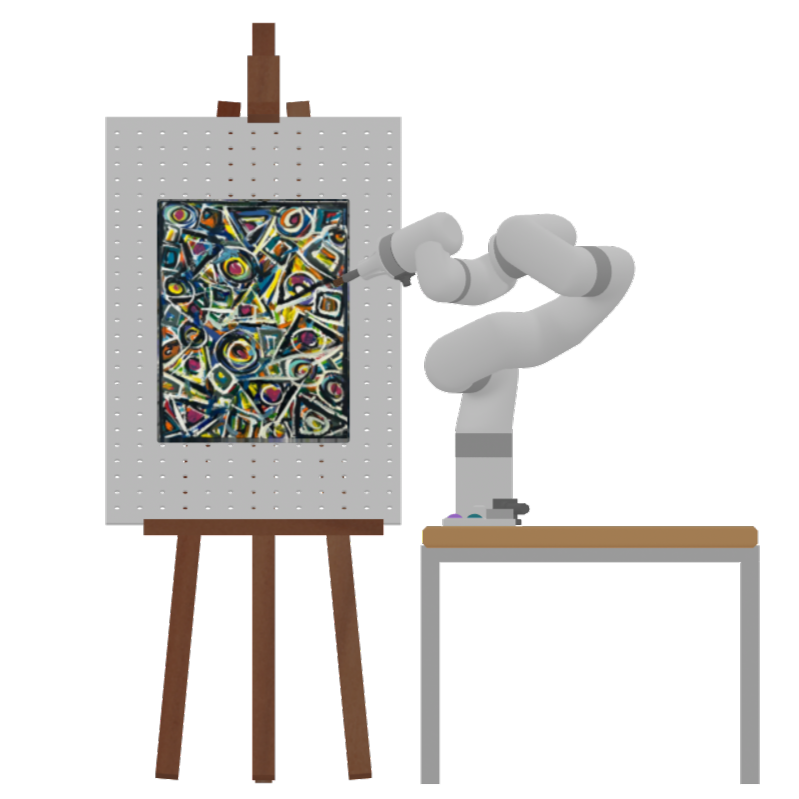
Experimental workspace with vertical easel, UF850 robotic arm, and curtained environment designed to simulate an artist's studio.
.png)
Mounted brush holder with four-section collet that snap-fits into the main body, accommodating various brush sizes and shapes.
The painting system utilizes a UF850 robotic arm positioned before a vertical easel. I designed 3D-printed holders for the palette, water container, and cleaning rag, optimizing for autonomous reachability while minimizing collision risk. A custom brush-swapping mechanism (inspired by retractable pen mechanics) features a cam-slotted main body and four-section flexible collet for tool-free brush changes. To enable vertical canvas painting, David Ho implemented coordinate transformations that map screen-space outputs to calibrated easel coordinates through scaling, rotation, and translation. The ROS 2 state machine governs robot behavior through IDLE, PAINTING, GO_HOME, and CHANGE_PAINT states, while voice integration via AssemblyAI enables hands-free start/stop commands.
The proposed Fontana UI streamlines the artist's workflow by automating terminal commands and system checks into a single launch application. The interface features a live camera view of the canvas with text overlays indicating the robot's current action (painting, retrieving paint, idle). A voice activity indicator visualizes speech input—turning blue/purple when "Robot" is recognized and red when "stop" is detected. A command log panel displays recognized commands, robot actions, and CoFRIDA system messages for transparency and debugging. Pop-up dialogs allow artists to select painting options via click or voice input, supporting a fully hands-free creative experience.
Francesca was a visiting PhD Student at the University of Michigan. She is a PhD Student at the Italian Institute of Technology.

