manta ray ballast tank
Buoyancy at Command
Buoyancy at Command


The Manta Ray Ballast Tank is a cost-effective, Raspberry Pi-controlled device with PID feedback for precise buoyancy control
Co-Creator
AUG 2023 - DEC 2023
Kyle Scott
The primary objective of this project is to advance the study of soft robotic fins, inspired by the biomechanics of manta rays, which could potentially replace conventional propeller systems in underwater vehicles. This new testing platform will automate the measurement of thrust forces and provide valuable data on the performance of various fin designs under controlled conditions.
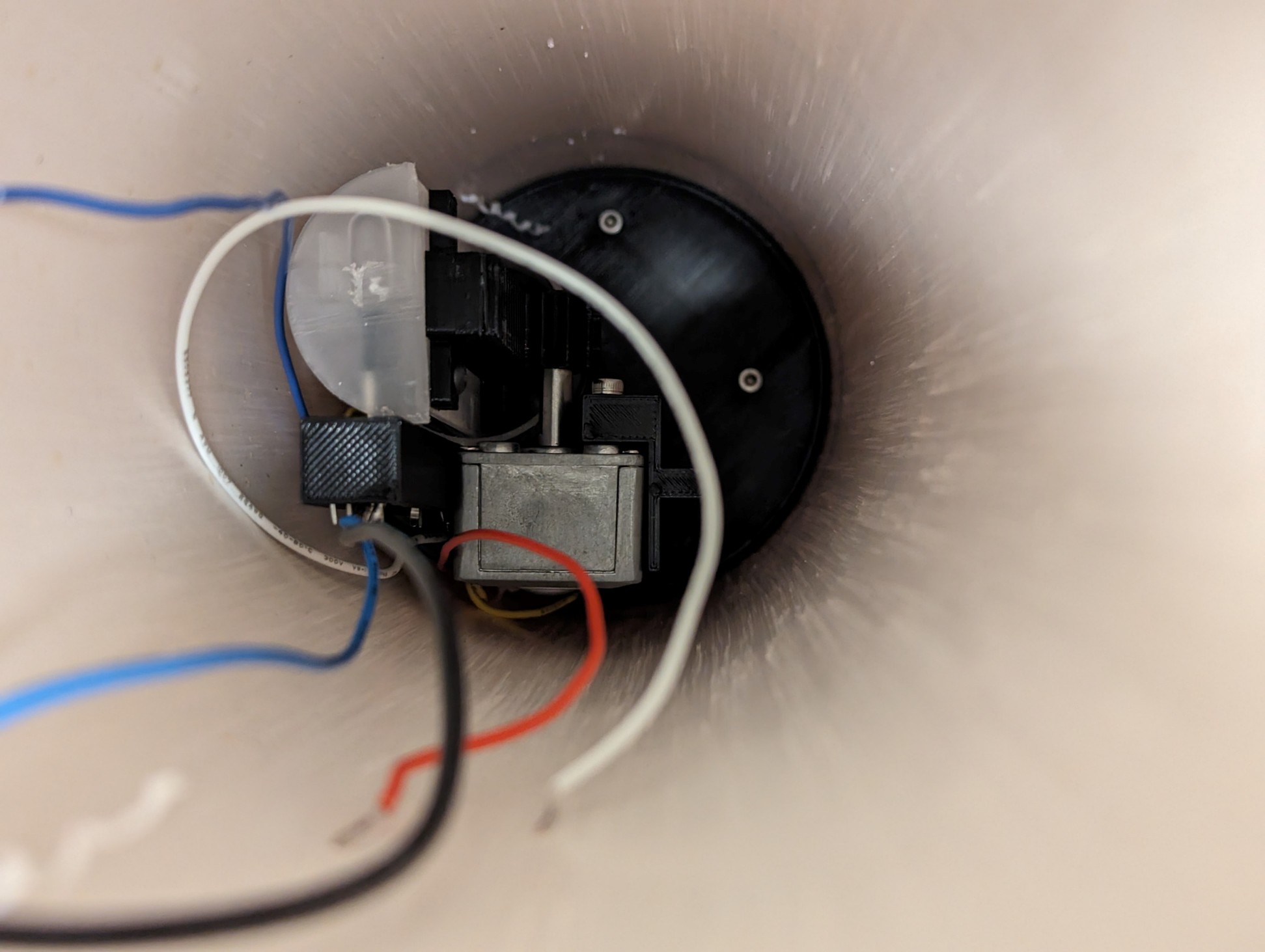
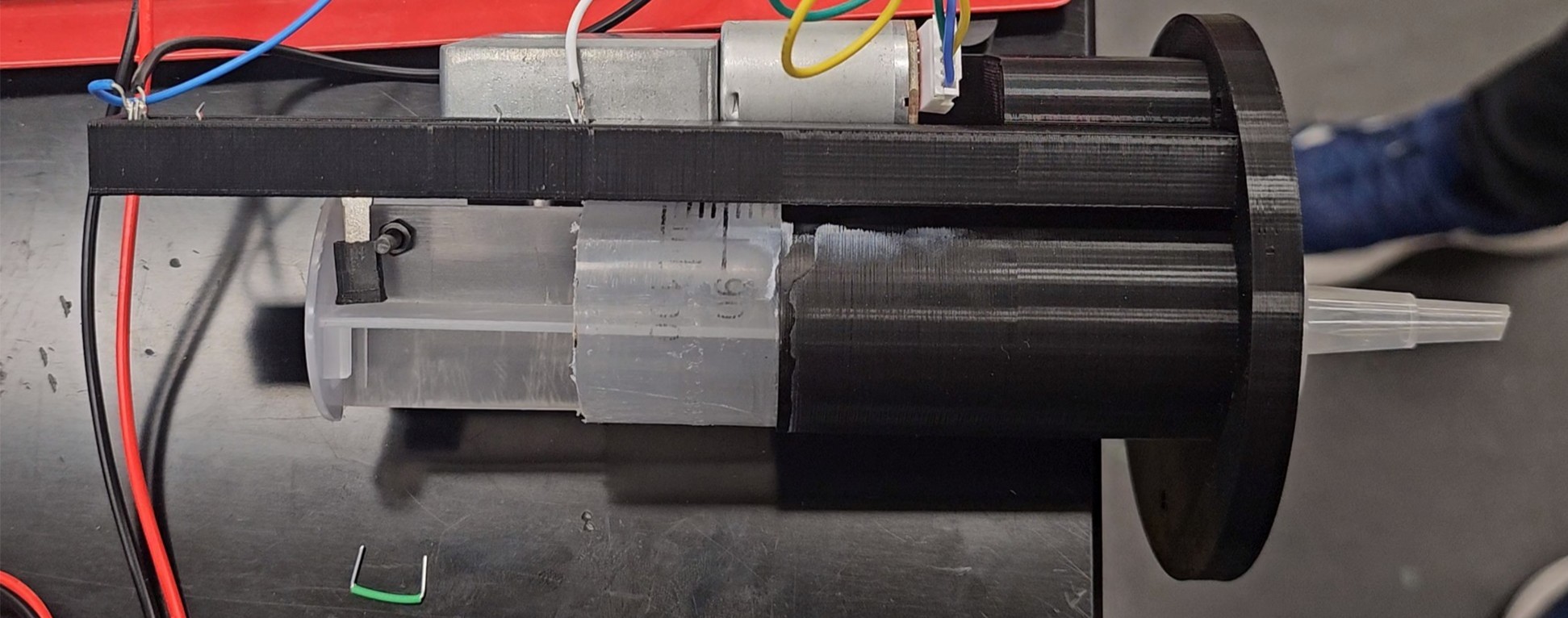
The close-up shows the ballast mechanism installed inside the PVC pipe, with the motor, potentiometer, and syringe assembly mounted to the endcap. Power and signal wires route through the sealed housing to connect with the external control electronics.
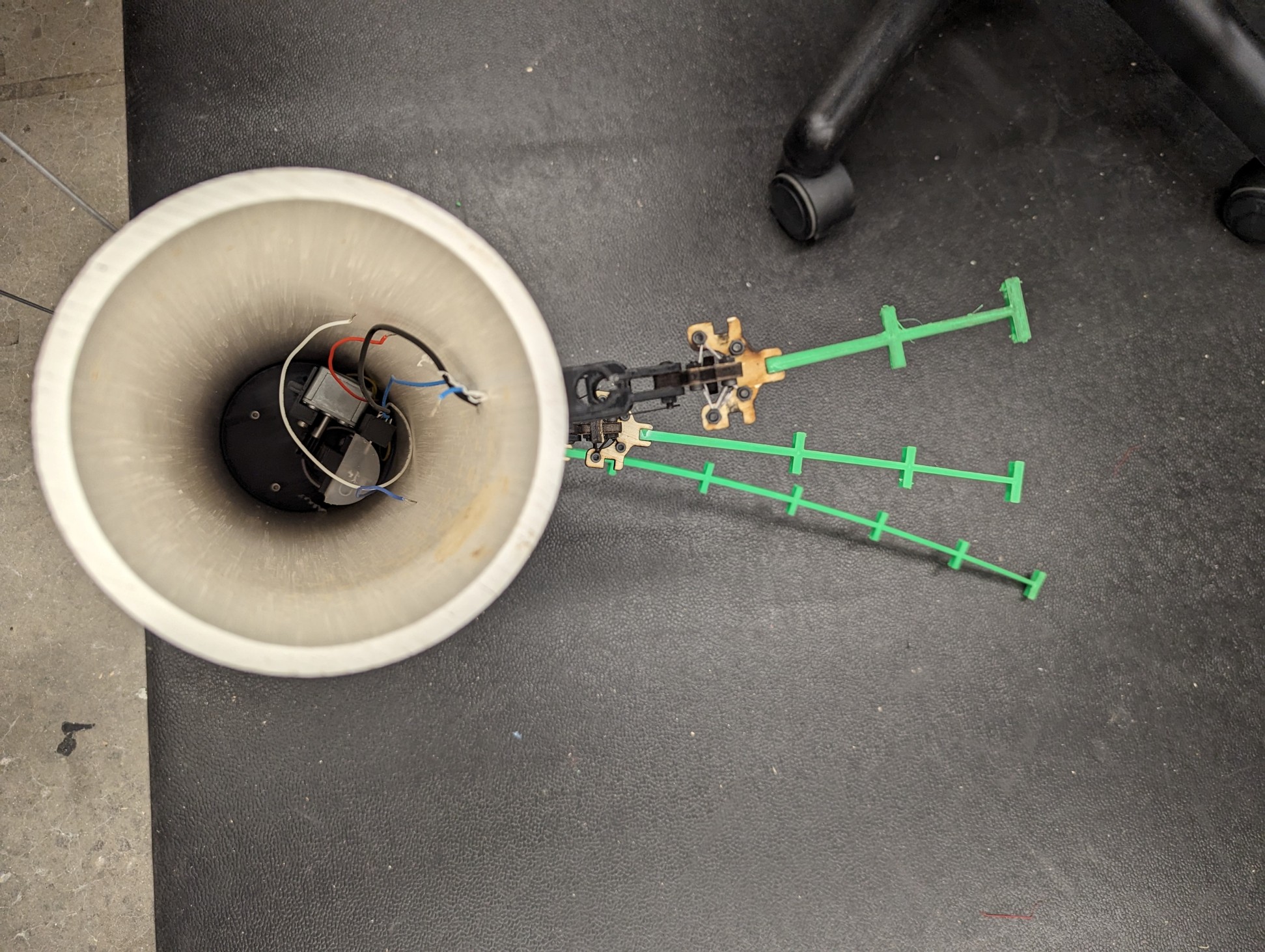
The zoomed-out view shows the complete ballast tank with one endcap removed, revealing the mechanism seated inside. The manta ray robot's fin assembly sits alongside, ready for final integration once the tank is sealed and tested.
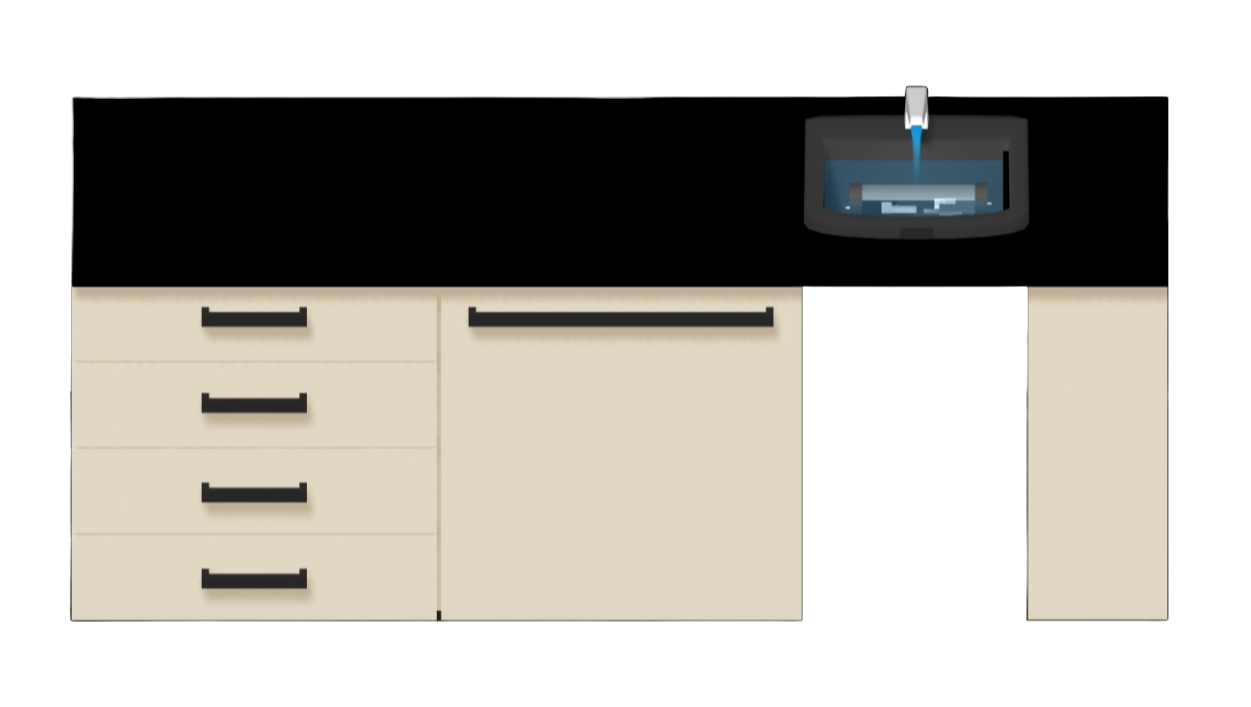
A GUI slider sends position commands to the Raspberry Pi, which calculates the error between the target and current syringe position via a potentiometer and ADC. The proportional controller adjusts motor PWM accordingly, driving the rack-and-pinion mechanism to extend or retract the syringe for precise volume displacement.
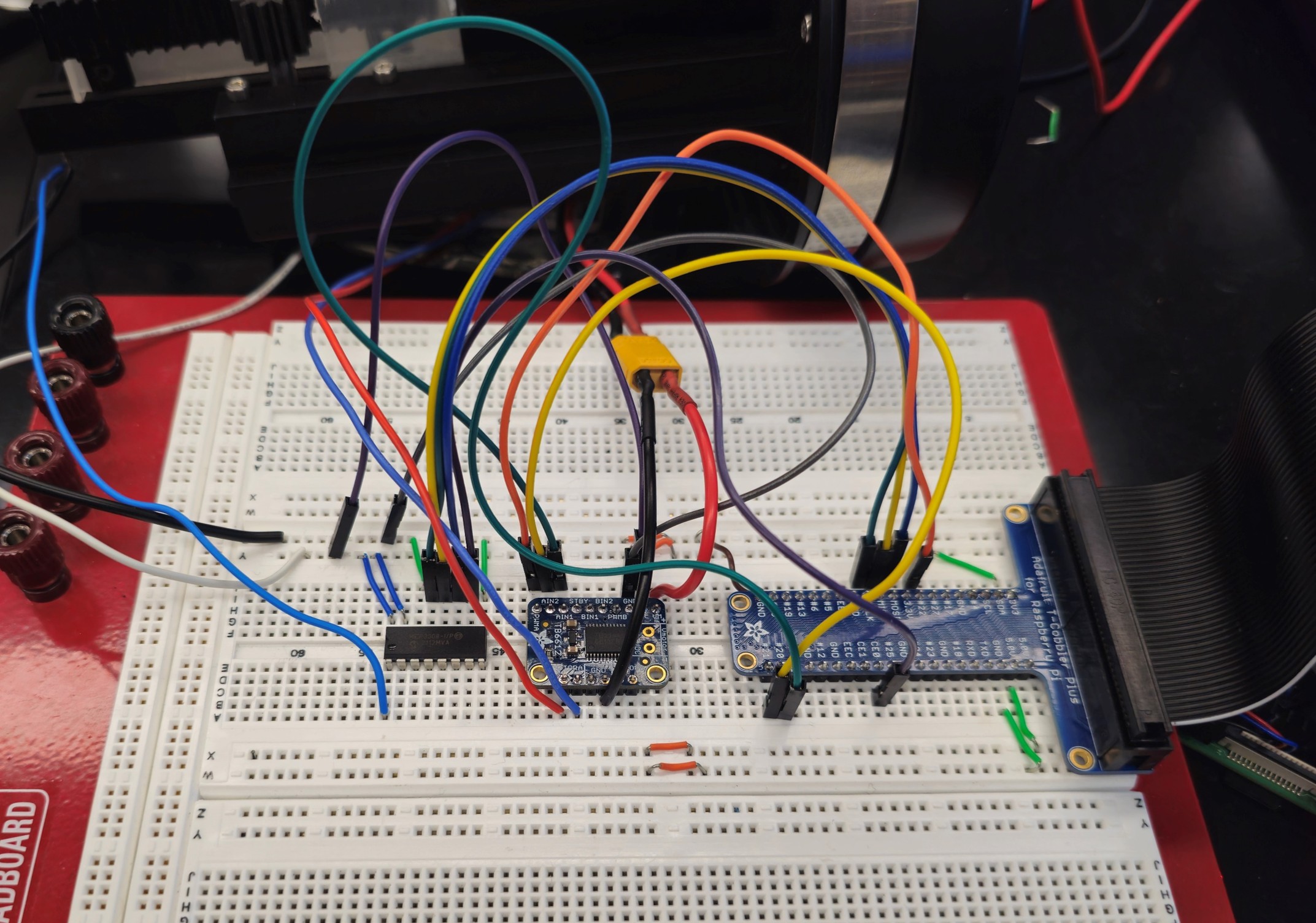
The control electronics are prototyped on a breadboard, interfacing a Raspberry Pi with an ADC for potentiometer feedback and a motor controller for driving the worm gear motor. This setup enables real-time position sensing and closed-loop control of the syringe mechanism.
All Mechatronics project teams consist of 2 individuals that create an electro-mechanical solution to a given problem.

