slipstream
Squeezing Through the Chaos
Squeezing Through the Chaos


SlipStream is a soft robotic system designed to navigate tight, complex spaces with ease.
Creator
JAN 2025 - MAY 2025
Dr. Xiaonan Huang
The primary objective of this project is to develop a modular soft robotic system capable of navigating confined and irregular environments as narrow as 5 cm in diameter. Leveraging a flexible tread-based locomotion mechanism and compliant structural design, SlipStream adapts to rubble, deformable boundaries, and sharp turns with high reliability. This platform integrates iterative design, precision fabrication, and material optimization to demonstrate the potential of soft robotics for inspection, cable routing, and disaster-response tasks in challenging real-world conditions.

SlipStream earned 2nd place in the Pipe Locomotion Challenge at the IEEE RoboSoft 2025 conference in Lausanne, Switzerland. Competing against teams from around the world, the robot demonstrated exceptional performance in navigating confined pipe environments, validating its compliant design and adaptive locomotion capabilities on an international stage.
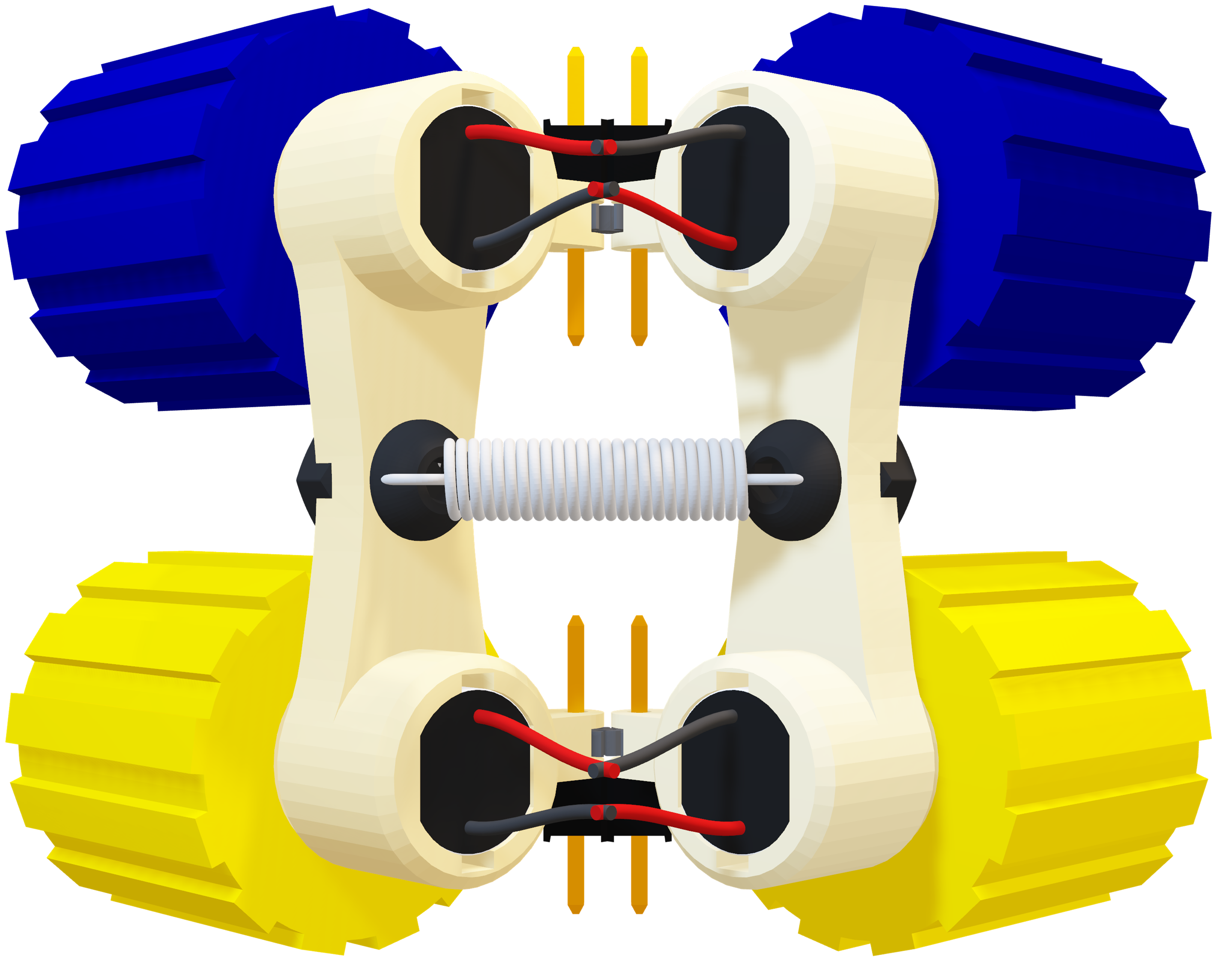
The chassis flexes to accommodate varying pipe diameters, allowing the robot to maintain contact with the walls even as the environment narrows or expands.
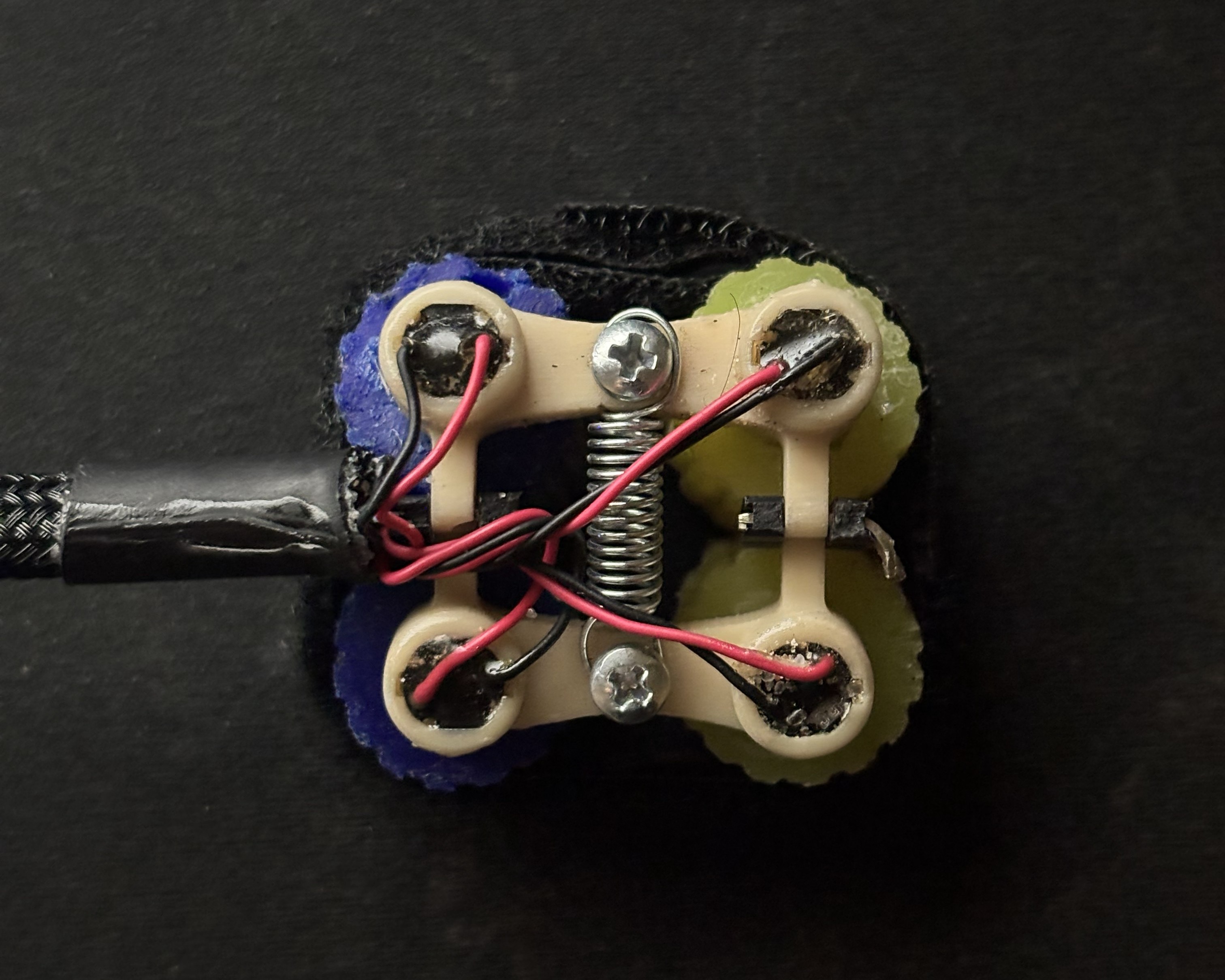
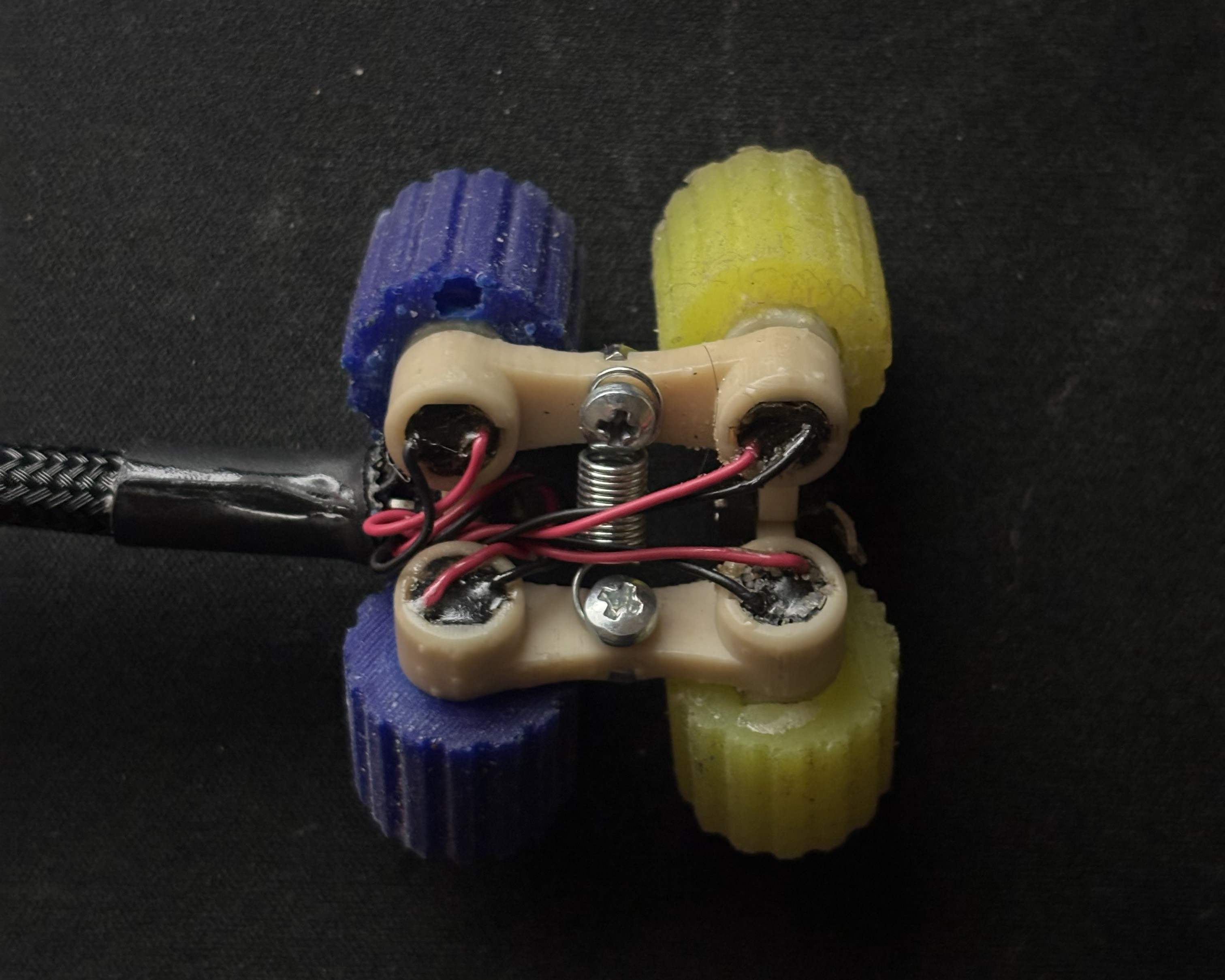
When compressed by pipe walls, the compliant frame distributes pressure evenly across all contact points, ensuring reliable traction through tight sections.
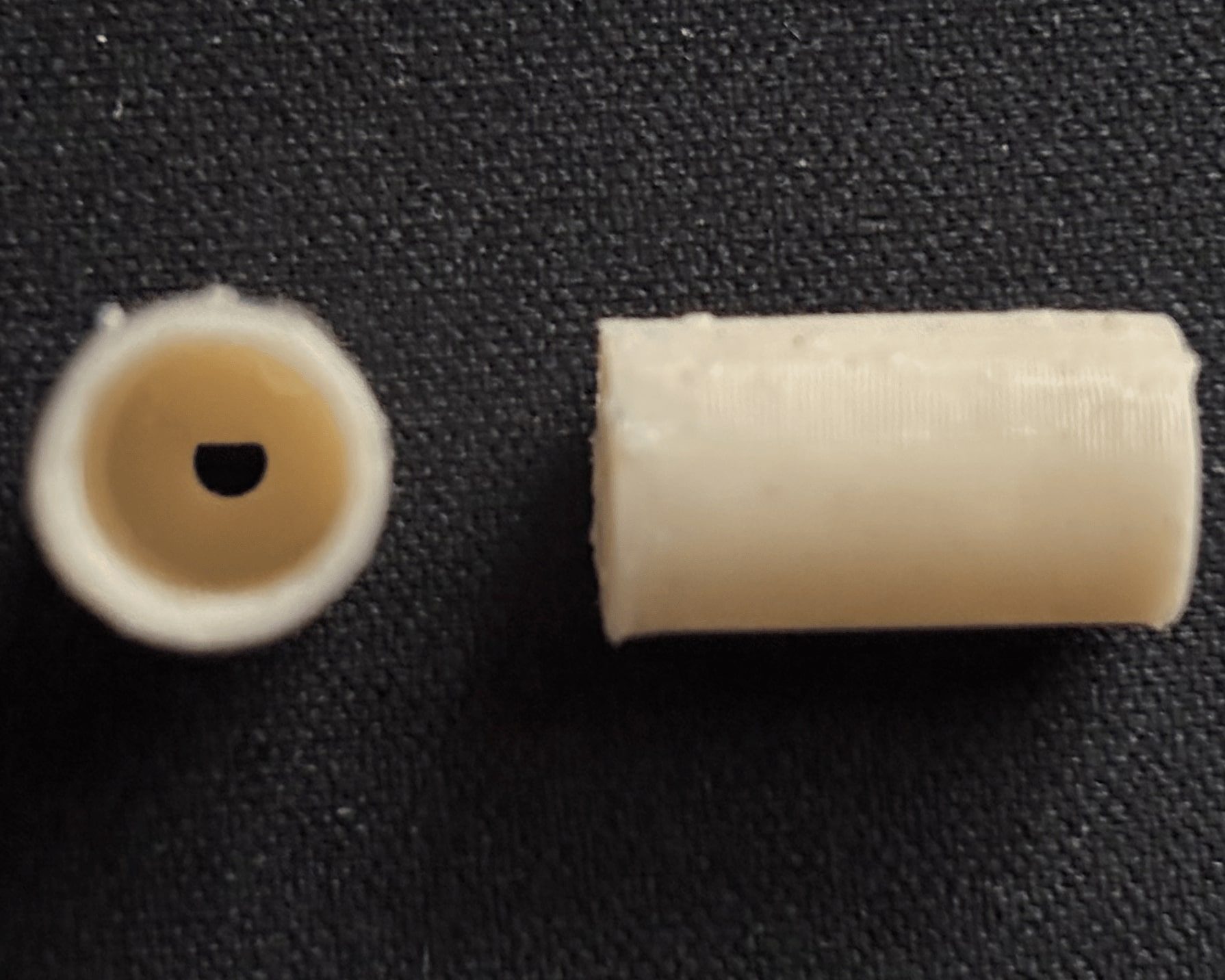
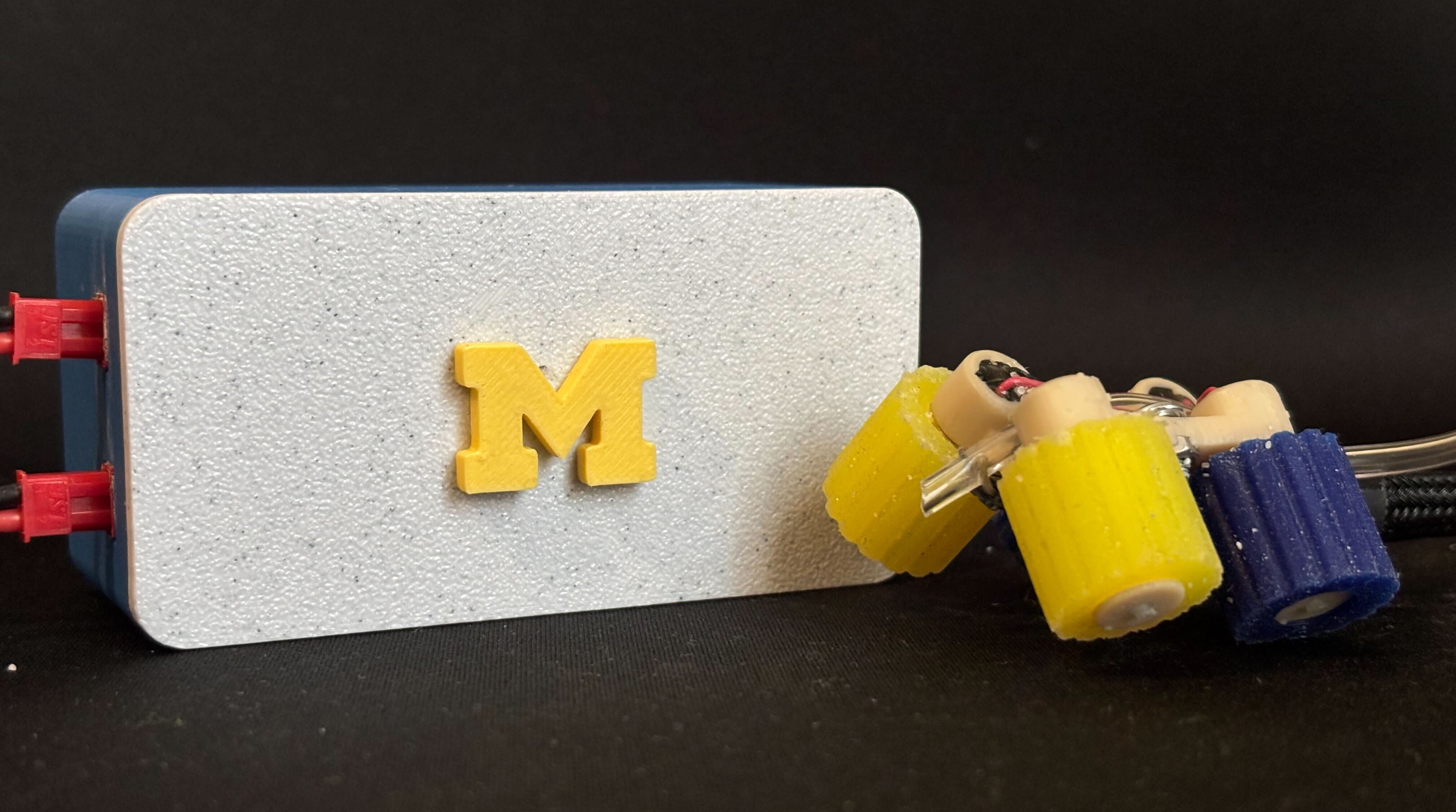
The rigid wheel cores are 3D-printed using Precision Model resin, providing a durable and dimensionally accurate base for mounting the soft treads.
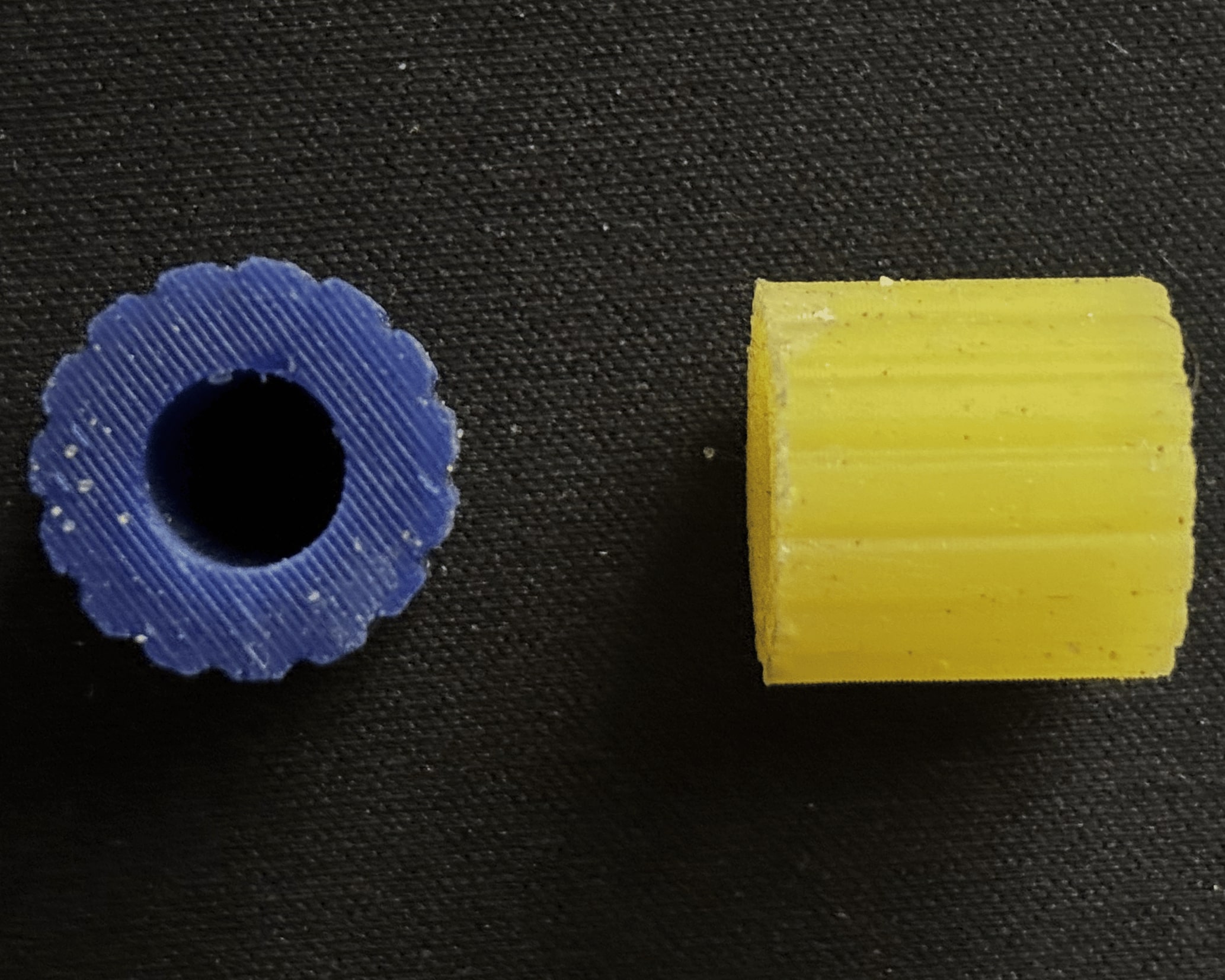
EcoFlex 00-50 silicone treads wrap around the resin hubs, offering high compliance and friction for gripping smooth pipe surfaces without slipping.
This video walkthrough covers the complete SlipStream system—from initial design concepts and compliant mechanism assembly to real-world testing across diverse conditions. Watch as the robot navigates horizontal and vertical pipes, climbs slopes, adjusts speed, and traverses challenging terrain including gravel and rubble, showcasing its adaptability and robust performance in confined, irregular environments.

